JP
JP





インストールする方法
壁掛け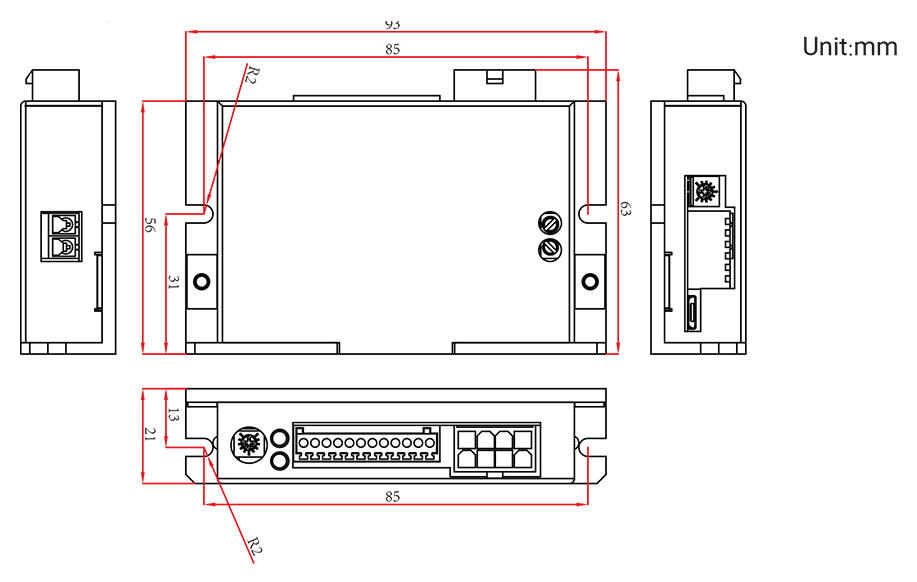
環境の要件
|
環境温度 |
環境湿度 |
高度 |
環境振動 |
保護度 |
|
-10℃〜40℃(結露なし) |
85%未満(結露なし) |
1000メートル未満 |
継続的な振動や過度の衝撃はありません |
IP20 |
爆発、怪我、火災を防ぐため、爆発性環境、可燃性ガス、腐食性環境、および濡れやすい場所や可燃物の周囲では使用しないでください。
特徴
●コンパクト:限られたスペースに適しています:93mm * 50mm * 21mm
●電圧・電流:入力電圧24V(±20%)、出力電流7.5A(キーボードで調整可能)
●動作モード:開ループ、閉ループ(制御精度±0.5%)
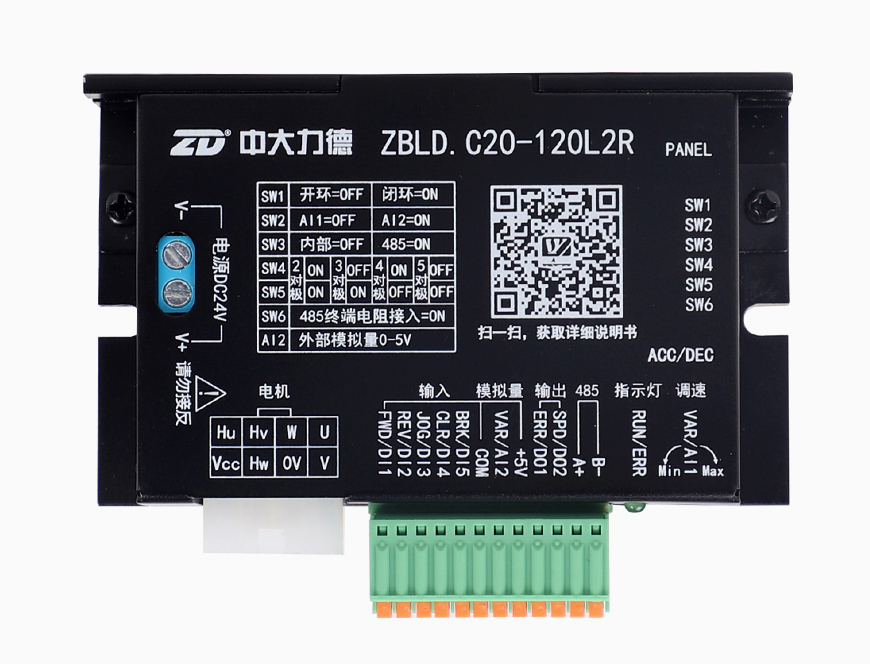
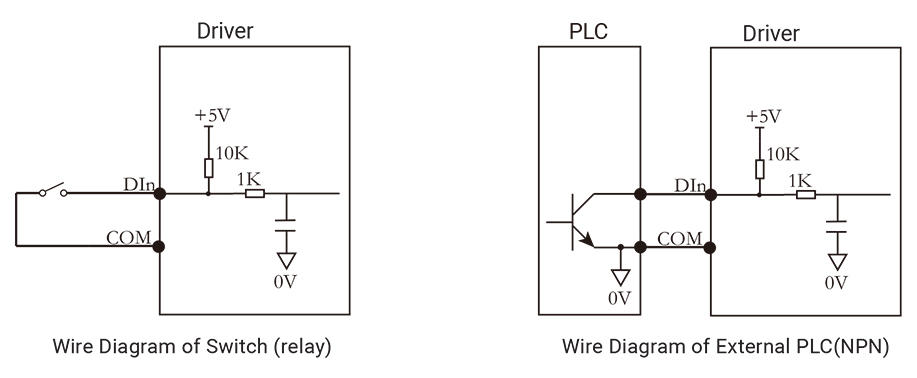
●コマンド設定:多機能入力端子制御(NPN入力)CAN Modbus、CANオープン通信制御外部キーボード制御
●速度設定:内蔵ノブ、外部アナログ電圧又はPWM(0〜5V / 10V)、PLC制御簡略0〜20kHzの周波数設定、通信設定、キーボード設定、多段速度制御、
●加減速制御:
0.3s〜10sつまみ、通信、キーボードで調整可能
●電子ブレーキ:高速電磁ブレーキ
●多機能入力インターフェース:
5つのデジタル入力(NPN)、キーボードによる設定:正転、逆転、インチング、フリーストップ、電子ブレーキ、多段速度など。
●多機能出力インターフェース:
2デジタル出力(オープンコレクタ出力)、キーボードによる設定:実行、エラー、速度出力、過負荷警告、仮想端末出力など。
●障害の表示と保護:
等温度に対するロータ、短絡、相不足を、ロックされた、負荷にわたって、過電流、過電圧、不足電圧:のような、エラー表示の保護の後にエラーLEDによって情報やキーボードを表示
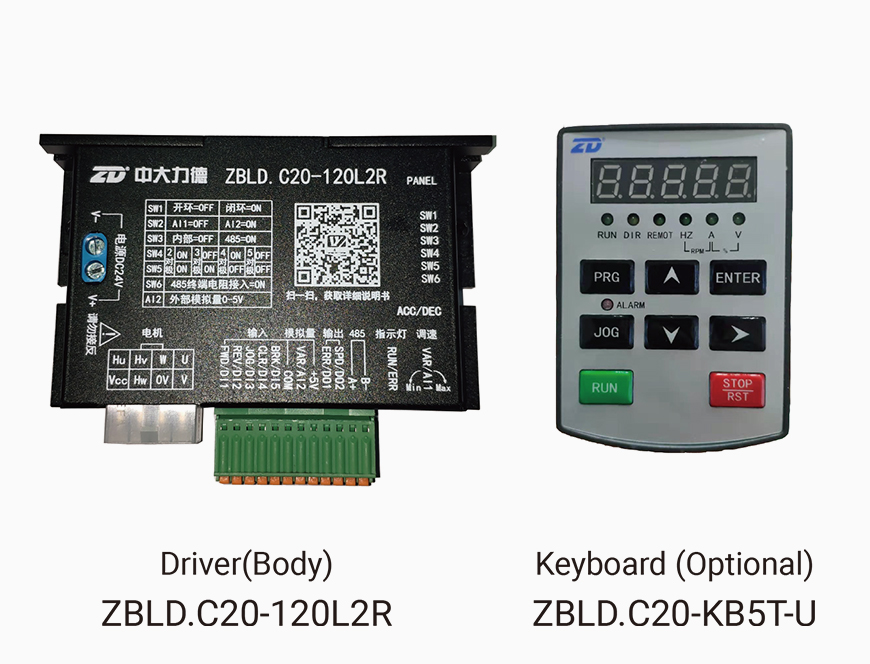
※キーボード制御、多機能入力、多機能出力、多段速度制御、簡易PLC制御は外付けキーボードで実現できます。
製品モデル

|
マーク |
序章 |
コンテンツ |
|
① |
会社 |
Z:ZDリーダー |
|
② |
モデル |
BLD:ブラシレスモータードライバー |
|
③ |
バージョン |
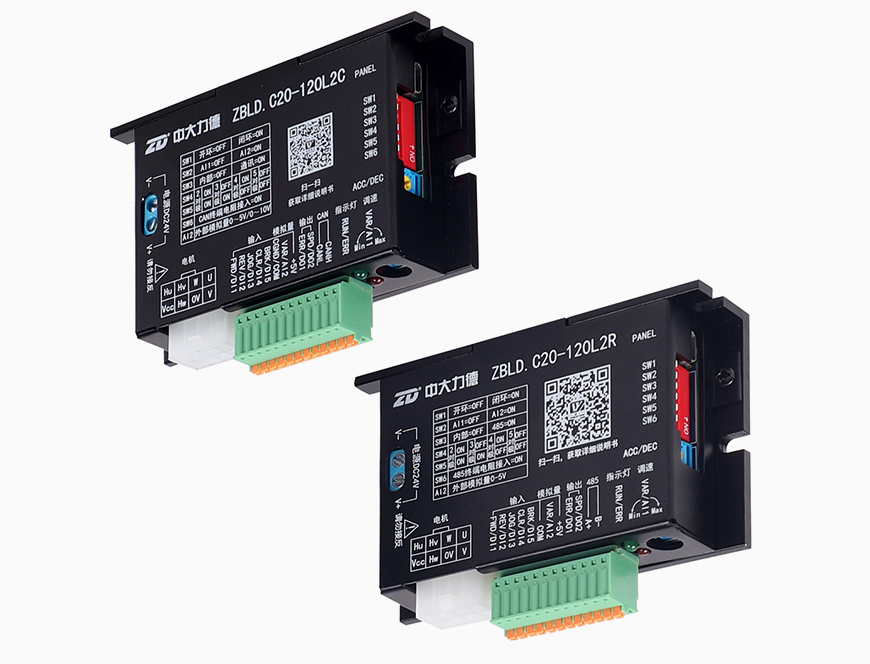
C20:C20シリーズ |
|
④④ |
力 |
120:最大出力電力120W |
|
⑤ |
索引 |
L:DC24V〜48V L1:12V L2:24V L3:36V L4:48V H:高電圧AC 220V D:デジタルディスプレイ付き R:485通信あり |
インストールする方法
壁掛け
環境の要件
|
環境温度 |
環境湿度 |
高度 |
環境振動 |
保護度 |
|
-10℃〜40℃(結露なし) |
85%未満(結露なし) |
1000メートル未満 |
継続的な振動や過度の衝撃はありません |
IP20 |
爆発、怪我、火災を防ぐため、爆発性環境、可燃性ガス、腐食性環境、および濡れやすい場所や可燃物の周囲では使用しないでください。
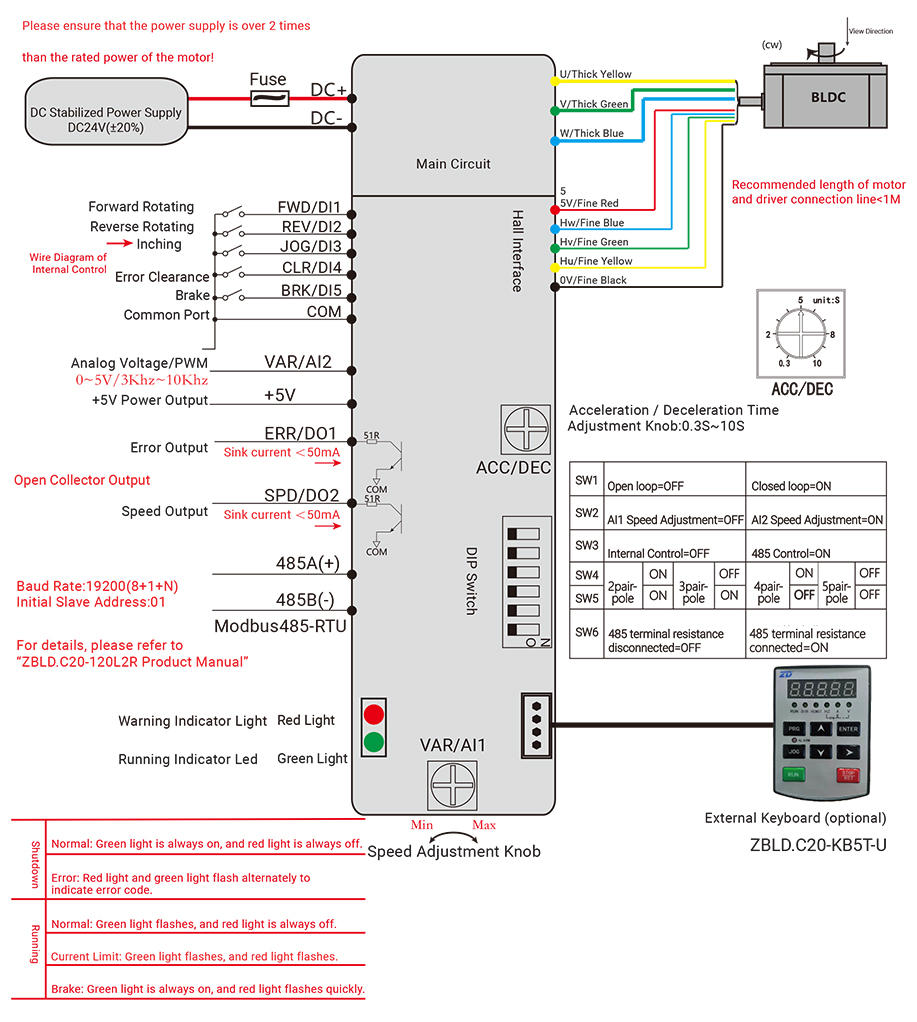
ドライバーは、エラーを検出すると停止し、同時にLED(赤、緑)または外部キーボードを介してエラーコードを示します。ユーザーはエラーコードに従ってトラブルシューティングを行うことができます。
 緑色のライトが5回1回点滅します
緑色のライトが5回1回点滅します  赤色のライトが1回点滅エラーコード=緑色のライトの点滅時間* 5赤色のライトの点滅時間
赤色のライトが1回点滅エラーコード=緑色のライトの点滅時間* 5赤色のライトの点滅時間
|
エラーコード |
エラー名 |
エラー表示 |
原因 |
の解き方 |
| 1 |
ハードウェアアクセラレーション過電流 |
0 1 |
1.過度に速い加速または減速 2.低電圧 3.ドライバーの低電力 4.衝撃荷重 5.相間の短絡 6.外部からの強い干渉 |
1.加速と減速の時間を増やす 2.入力電圧を確認します 3.パワーの大きいドライバーを選択する 4.正常にロードされているか確認します 5.ケーブルまたはモーターの確認/交換 6.外部に強い干渉がないか確認します |
| 2 |
ハードウェア減速過電流 |
0 2 |
||
| 3 |
ハードウェア定速過電流 |
0 3 |
||
| 4 |
ソフトウェアアクセラレーションオーバーカレント |
0 4 |
||
| 5 |
ソフトウェア減速過電流 |
0 5 |
||
| 6 |
ソフトウェア定速過電流 |
1 1 |
||
| 7 |
加速中の過電圧 |
1 2 |
1.高入力電圧 2.スピーディーな前進および後進スイッチ 3.外力による発電所の像 |
1.電源電圧を確認します 2.順方向および逆方向の切り替えにかかる時間を増やす 3.外部ブレーキを追加します
|
| 8 |
減速中の過電圧 |
1 3 |
||
| 9 |
定速運転中の過電圧 |
1 4 |
||
| 10 |
バスバーの不足電圧 |
1 5 |
1.低電圧
2.高速加速のための外部電源保護 3.電圧降下
4.ドライバーハードウェアが異常 |
1.入力電圧を確認します 2.加速時間を長くする 3.エラーリセット 4.エンジニアの支援を依頼する |
| 11 |
モーター過負荷 |
2 1 |
1.低電圧 2.モーターオーバーパワー 3.ローターがブロックされているか、突然の変更がロードされている |
1.入力電圧を確認します 2.モーターの定格電流を使用します 3.負荷を減らし、モーターと機械をチェックします |
| 12 |
ドライバーの過負荷 |
2 2 |
1.低電圧 2.高速加速 3.過負荷 |
1.入力電圧を確認します 2.加速時間を長くする 3.パワーの大きいドライバーに変更 |
| 13 |
ホールのエラー |
2 3 |
1.ホールの切断 2.外部からの強い干渉 |
1.ホールの接続を確認します 2.外部に強い干渉がないか確認します |
| 14 |
ロック済み |
2 4 |
1.過負荷 2.モーターロック |
1.モーターの機械的接続を確認します 2.モーターの配線図を確認します |
| 16 |
ドライバー過熱エラー |
3 1 |
1.過負荷 2.ドライバーハードウェアが異常 |
1.冷却 2.定格電力を下げる |
| 19 |
現在のエラー |
3 4 |
1.ドライバハードウェアが壊れている |
1.ドライバーを変更します |
| 27 |
データストレージエラー |
5 2 |
1.パワーアップクリア(PUC)の最大量に達する |
1.電源を入れ直す |
| 29 |
過電流フィードバックのエラー |
5 4 |
1.ドライバハードウェアが壊れている |
1.ドライバーを変更します |
| 30 |
入力フェーズの欠如のエラー |
5 5 |
1.U / V / W入力フェーズの欠如 2.ドライバハードウェアが壊れている |
1. U / V / Wが正しく接続されているかどうかを確認します 2.ドライバーを変更します |