JP
JP
使用環境
|
環境温度 |
環境湿度 |
高度 |
環境振動 |
保護等級 |
|
-10℃〜40℃(結露なし) |
85%以下(結露なし) |
1000m以下 |
連続振動や過度の衝撃がないように |
IP20 |
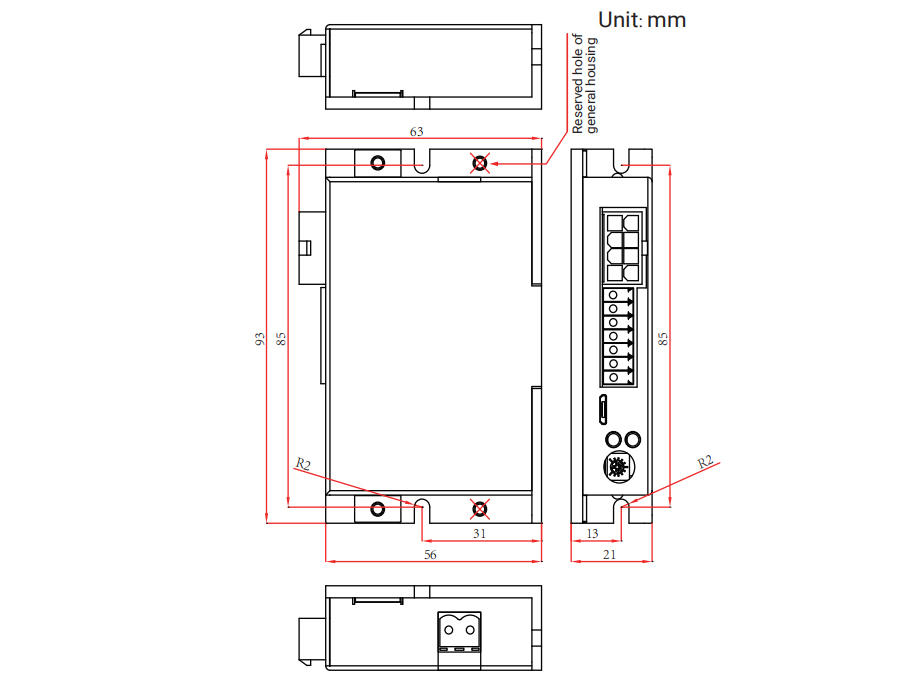
接続方法
壁掛け式
爆発、怪我、火災を防ぐため、爆発性の環境、可燃性ガス、腐食性の環境、および濡れやすい場所や周囲で使用しないでください。
特徴
●コンパクト: 制限ありスペースに適しています:93mm * 56mm * 21mm
●電圧・電流: 入力電圧24V〜48V(±20%)、出力電流7A(キーボードで調整可能)
●動作モード: 開ループ、閉ループ(制御精度±0.5%)
●コマンド設定: 多機能入力端子制御(NPN入力)
外部キーボードで制御
●速度設定: 内蔵式ノブ、外部アナログ電圧またはPWM(0〜5V / 10V)、キーボード設定
●加・減速制御: 0.3s〜10s キーボードで調整可能
●電子ブレーキ: 高速電磁ブレーキングの実現
●多機能入力インターフェース:
3つのデジタル量入力(NPN)、キーボードによる設定:正転、逆転、フリーストップ、電子ブ
レーキ、多段速度など。
●多機能出力インターフェース:
1つのデジタル出力(オープンコレクター出力)、キーボードによる設定:走行中、エラー・速
度出力・過負荷警告などの検出できる機能がある。
●エラー検出と保護機能:
過電圧、過電圧、過電流、過負荷、ローターのロック、相数不足、過熱などのエラー検出;
エラーを検出後、エラーの種類により相対する保護を行います。LEDまたはキーボードでエラー
情報を表示します。
※キーボードで制御、入力、出力などは多機能の外付けキーボードがあります。
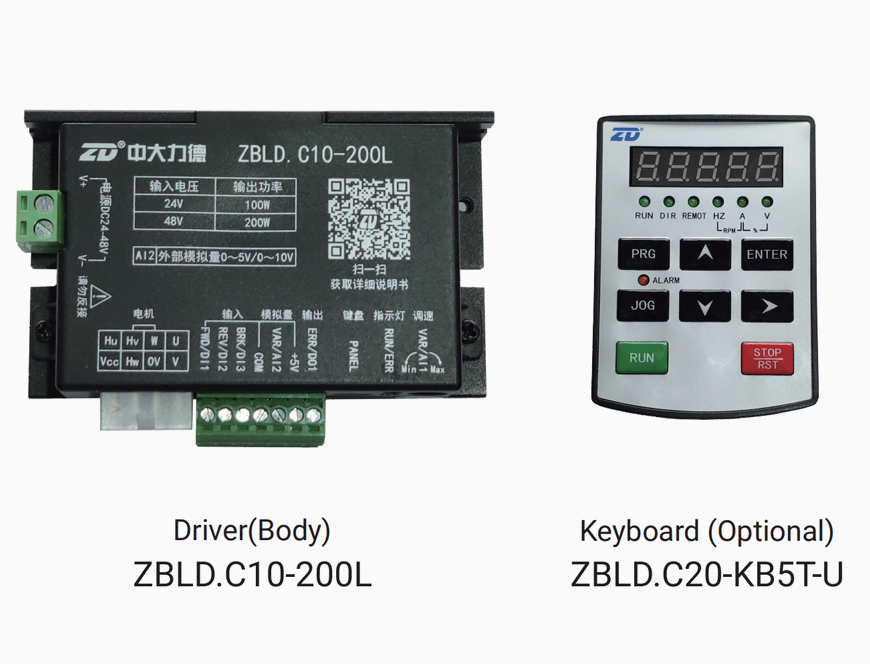
型番の読み方

|
マーク |
解釈 |
内容 |
|
① |
会社名 |
Z:ZD Leader |
|
② |
モデル |
BLD:ブラシレスモータドライバー |
|
③ |
バージョン |
C10:C10シリーズ |
|
④ |
出力 |
200:最大出力200W |
|
⑤ |
属性 |
L:DC24V〜48V H:高電圧AC 220V |
使用環境
|
環境温度 |
環境湿度 |
高度 |
環境振動 |
保護等級 |
|
-10℃〜40℃(結露なし) |
85%以下(結露なし) |
1000m以下 |
連続振動や過度の衝撃がないように |
IP20 |
壁掛け式
爆発、怪我、火災を防ぐため、爆発性の環境、可燃性ガス、腐食性の環境、および濡れやすい場所や周囲で使用しないでください。
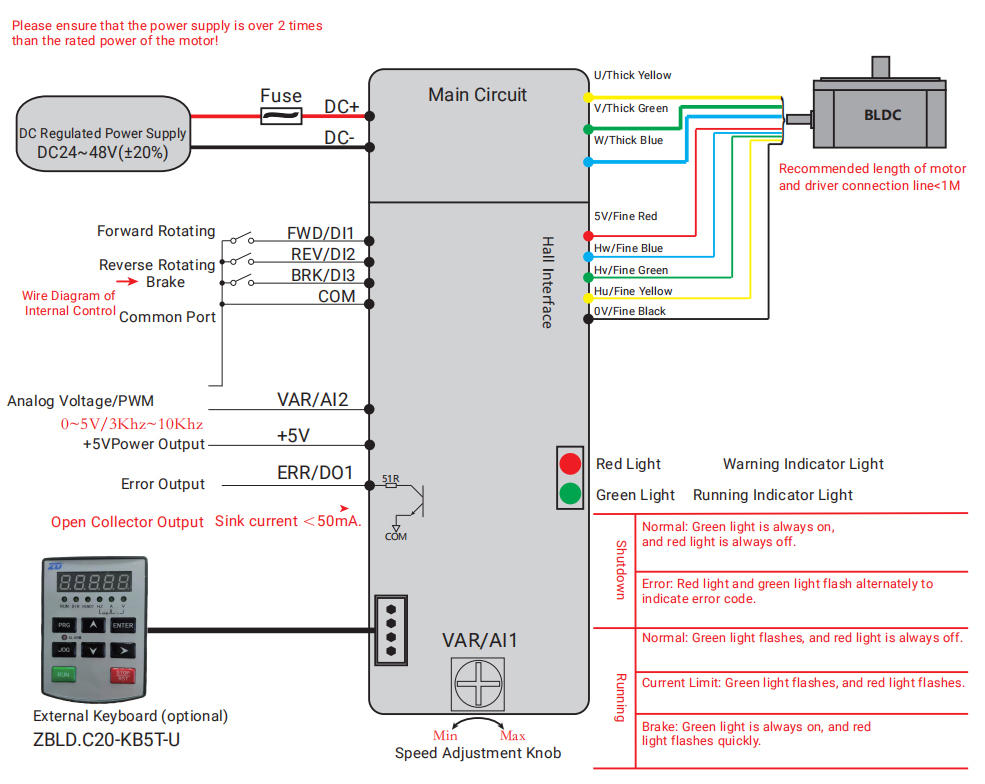
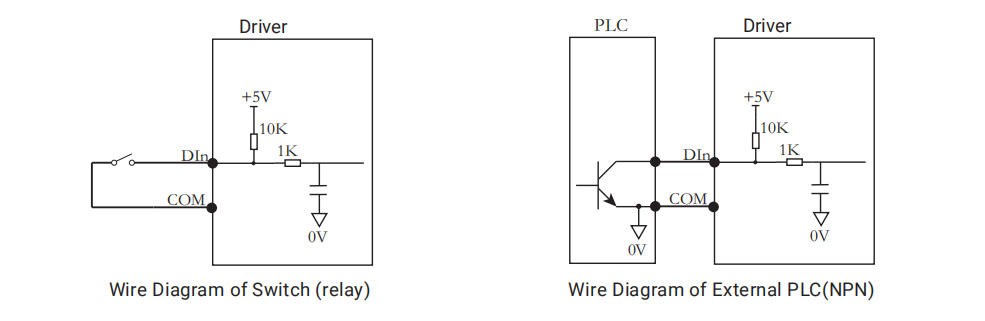
スタートストップ調整:スタートストップ制御用にスイッチ(リレー)或はPLC(NPN)を取り付けることができます。
注意:
1.接続前に電源を切り、専門の技術者が接続作業を行ってください。
2.電源ケーブルを逆に接続したり、電源端子以外の端子に接続したりしないでください。ドライバーが破損する恐れがあります。
3.しっかりとアースしてくだい。
4.緩まないように、接続端子とワイヤの間のネジを締めてください。
5.回路配線後、すべての接続が正しく接続されていると再確認をしてください。
6.負荷のある垂直方向の持ち上げにはご使用しないでください!
ドライバーは、エラーを検出すると停止し、と同時にLED(赤、緑)または外部キーボードを介してエラーコードを示します。ユーザーはエラーコードに従ってトラブルシューティングを行うことができます。
 緑色のライトが1回点滅すると5を意味します。
緑色のライトが1回点滅すると5を意味します。
 赤色のライトが1回点滅すると1を意味します。
赤色のライトが1回点滅すると1を意味します。
エラーコード=緑色のライトの点滅回数* 5+赤色のライトの点滅回数
|
エラーコード |
エラー名 |
エラー表示コード |
エラー原因 |
解決方法 |
| 1 |
ハードウェア加速過電流 |
0 1 |
1.過度に加速または減速 2.低電圧 3.ドライバーの低出力 4.衝撃荷重 5.相間の短絡 6.外部からの強い干渉 |
1.加速と減速の時間を増やす 2.入力電圧を確認する 3.出力の大きいドライバーを使用する 4.正常にロードされているか確認します 5.ケーブルまたはモーターの確認/交換 6.外部に強い干渉がないか確認します |
| 2 |
ハードウェア減速過電流 |
0 2 |
||
| 3 |
ハードウェア定速過電流 |
0 3 |
||
| 4 |
ソフトウェア加速過電流 |
0 4 |
||
| 5 |
ソフトウェア減速過電流 |
0 5 |
||
| 6 |
ソフトウェア定速過電流 |
1 1 |
||
| 7 |
加速中の過電圧 |
1 2 |
1.入力電圧が高過ぎ 2.正・逆回転が早過ぎ 3.外力による発電状態 |
1.電源電圧を確認する 2.正・逆回転の切り替え時間を増やす 3.外部ブレーキを付ける
|
| 8 |
減速中の過電圧 |
1 3 |
||
| 9 |
定速運転中の過電圧 |
1 4 |
||
| 10 |
バスバーの電圧不足 |
1 5 |
1.低電圧
2.高速加速のための外部電源保護機能の起動 3.電圧降下
4.ドライバーハードウェアが異常 |
1.入力電圧を確認する 2.加速時間を長くする 3.エラーリセット 4.エンジニアからサポート |
| 11 |
モータの過負荷 |
2 1 |
1.低電圧 2.モータオーバーパワー 3.ローターがブロックされているか、突然ロードされている |
1.入力電圧を確認する 2.モータの定格電流を使用する 3.負荷を軽減し、モータと機械を確認する |
| 12 |
ドライバーの過負荷 |
2 2 |
1.低電圧 2.高速加速 3.過負荷 |
1.入力電圧を確認する 2.加速時間を長くする 3.出力の大きいドライバーに変更する |
| 13 |
ホールのエラー |
2 3 |
1.ホールの切断 2.外部からの強い干渉 |
1.ホールの接続を確認する 2.外部に強い干渉がないかを確認する |
| 14 |
ロック |
2 4 |
1.過負荷 2.モータロック |
1.モータと機械的接続を確認する 2.モータの配線図を確認する |
| 16 |
ドライバーの過熱 |
3 1 |
1.過負荷 2.ドライバーハードウェアが異常 |
1.冷却 2.定格電力を下げる |
| 19 |
電流検出エラー |
3 4 |
1.ドライバハードウェアが壊れている |
1.ドライバーを変更する |
| 27 |
データセーブエラー |
5 2 |
1.パワーアップクリア(PUC)の最大量に超えている |
1.電源を入れ直す |
| 29 |
過電流フィードバックのエラー |
5 4 |
1.ドライバハードウェアが壊れている |
1.ドライバーを変更する |
| 30 |
入力フェーズの欠如エラー |
5 5 |
1.U / V / W入力フェーズの欠如 2.ドライバハードウェアが壊れている |
1. U / V / Wが正しく接続されているかどうかを確認する 2.ドライバーを変更する |