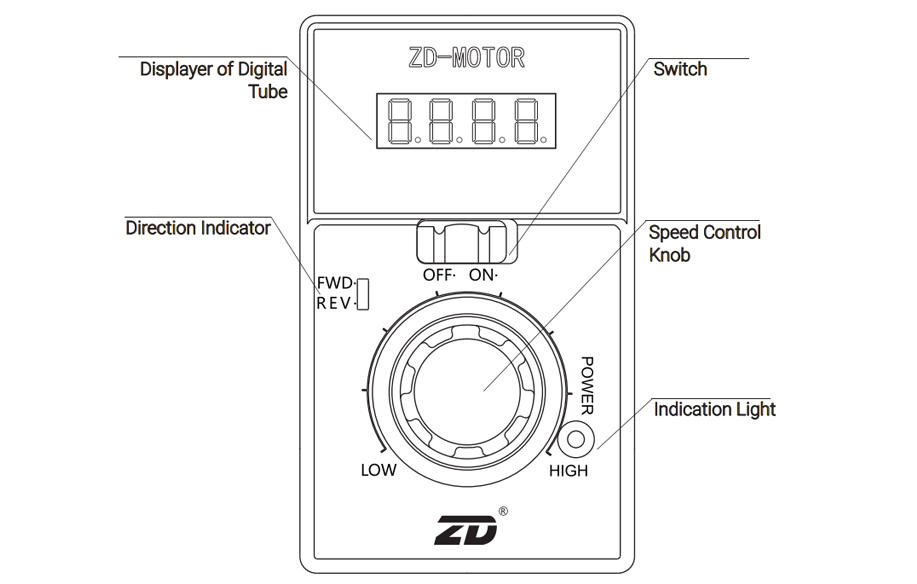
●デジタル表示:4桁のLEDチューブ表示:動作状態、設定速度、動作速度、エラー表示
●安定動作: 速度閉ループ制御(精度±0.5%)
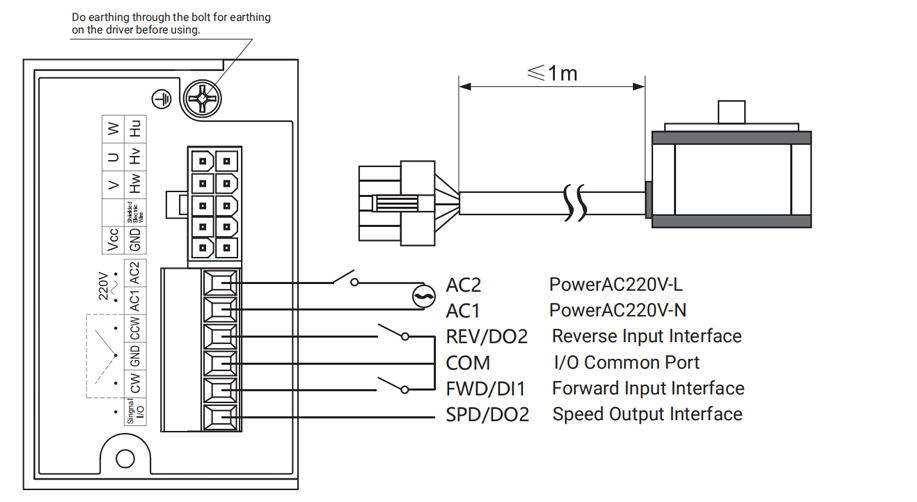
●I / O: 2組のNPNデジタル入力インターフェース(正方向・逆方向)
1組シンク出力インターフェース(エラー出力)
●速度設定: パネルのつまみで速度を設定します。
●エラー検出・保護機能:
過電圧、過電圧、過電流、過負荷、ローターのロック、相数不足、過熱などのエラー検出;
エラーを検出後、エラーの種類により相対する保護を行います。LEDでエラー情報を表示されま
す。

|
マーク
|
解釈
|
内容
|
|
①
|
会社
|
Z:ZD Leader
|
|
②
|
モデル
|
BLD:ブラシレスモータドライバー
|
|
③
|
バージョン
|
C10:C10シリーズ
|
|
④
|
出力
|
200:最大出力200W
|
|
⑤
|
属性
|
L:DC24V〜48V
H:高電圧AC 220V
D:デジタルディスプレイ付き
R:485通信あり
|
ドライバーは、エラーを検出すると停止し、同時にエラーコードを示します。ユーザーはエラーコードによりトラブルシューティングを行うことができます
(注意:トラブルシューティングの前に、少なくとも5分間電源をオフにしておく必要があります!)
|
エラーコード
|
エラー名
|
エラー表示コード
|
原因
|
解決方法
|
| 1 |
ハードウェア加速過電流
|
OCH1
|
1.低電圧
2.ドライバーの低出力
3.衝撃荷重
4.相間の短絡
5.外部からの強い干渉
|
1.入力電圧を確認します
2.パワーの大きいドライバーを選択する
3.正常負荷しているか確認する
4.ケーブルまたはモータの確認/交換
5.外部に強い干渉がないか確認する
|
| 2 |
ハードウェア減速過電流
|
OCH2
|
| 3 |
ハードウェア定速過電流
|
OCH3
|
| 4 |
ソフトウェア加速過電流
|
OC1
|
| 5 |
ソフトウェア減速過電流
|
OC2
|
| 6 |
ソフトウェア定速過電流
|
OC3
|
| 7 |
加速中の過電圧
|
OV1
|
1.入力電圧が高過ぎ
2.正・逆回転が早過ぎ
3.外力による発電状態
|
1.電源電圧を確認する
2.正・逆回転の切り替え時間を増やす
3.外部ブレーキを付ける
|
| 8 |
減速中の過電圧
|
OV2
|
| 9 |
定速運転中の過電圧
|
OV3
|
| 10 |
バスバーの電圧不足
|
UV
|
1.低電圧
2.高速加速のための外部電源保護機能の起動
3.電圧降下
4.ドライバーハードウェアが異常
|
1.入力電圧を確認する
2.加速時間を長くする
3.エラーリセット
4.エンジニアからサポート
|
| 11 |
モータ過負荷
|
OL1
|
1.低電圧
2.モーターオーバーパワー
3.ローターがブロックされているか、突然の変更がロードされている
|
1.入力電圧を確認する
2.モータの定格電流を使用する
3.負荷を軽減し、モータと機械を確認する
|
| 12 |
ドライバーの過負荷
|
OL2
|
1.低電圧
2.過負荷
|
1.入力電圧を確認する
2.出力の大きいドライバーに変更する
|
| 13 |
ホールのエラー
|
ホール
|
1.ホールの切断
2.外部からの強い干渉
|
1.ホールの接続を確認します
2.外部に強い干渉がないか確認します
|
| 14 |
ロック
|
ロック
|
1.過負荷
2.モータロック
|
1.モータと機械的接続を確認する
2.モータの配線図を確認する
|
| 19 |
電流検出エラー
|
CUr
|
1.ドライバハードウェアが壊れている
|
1.ドライバーを変更する
|
| 27 |
データセーブエラー
|
EEP
|
1.パワーアップクリア(PUC)の最大量に超えている
|
1.電源を入れ直す
|
| 29 |
過電流フィードバックのエラー
|
OCHF
|
1.ドライバハードウェアが壊れている
|
1.ドライバーを変更する
|
| 30 |
入力フェーズの欠如エラー
|
POUT
|
1.U / V / W入力フェーズの欠如
2.ドライバハードウェアが壊れている
|
1. U / V / Wが正しく接続されているかどうかを確認する
2.ドライバーを変更する
|
 JP
JP