ミッション :中大、自動化の運用を無限化なる可能性を実現する。
.jpg)
●60W(24VDC / 36VDC / 48VDCに適用した場合のDC電源)
|
定格電力(連続) |
W |
60(40W / 60W) |
|||
|
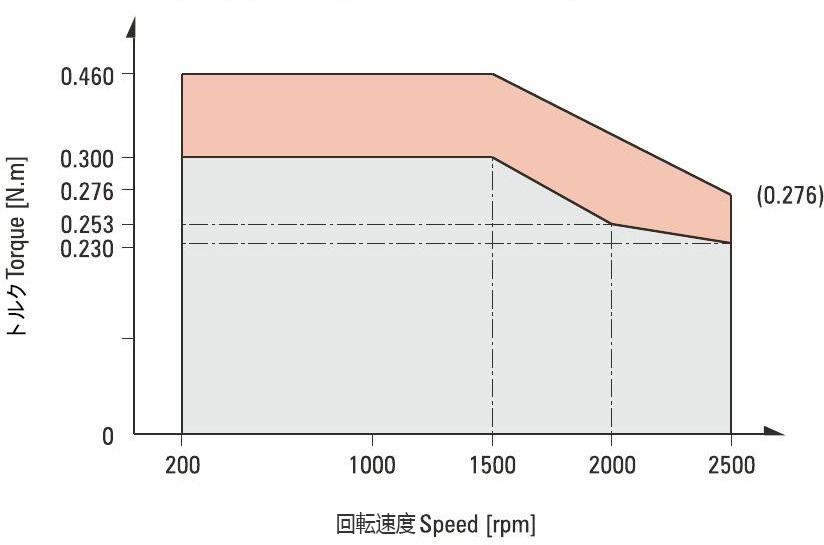
定格速度 |
rpm |
2500 |
|||
|
定格トルク |
N.m |
0.230 |
|||
|
瞬時最大トルク |
N.m |
0.345 |
|||
|
ローター慣性モーメント |
J:x10 -4 kg.m 2 |
0.082 |
|||
|
速度制御範囲 |
rpm |
高圧200-2500rpm(低圧200-3000rpm) |
|||
|
速度制御範囲 |
ロード時 |
±1%以下:条件0〜定格トルク、定格速度、定格電圧、室温 |
|||
|
電圧で |
±1%以下:定格電圧±10%、定格速度、定格負荷、室温 |
||||
|
温度で |
±1%以下:周囲温度0〜40°cの定格電圧、定格負荷、定格速度の条件 |
||||
|
電源入力 |
定格電圧 |
V |
単相110V |
単相220V | 24VDC(オプション36VDC / 48VDC) |
|
電圧許容範囲 |
±10% |
||||
|
周波数 |
Hz |
50/60 |
/ |
||
|
周波数許容範囲 |
±5% |
/ |
|||
|
定格入力電流 |
A |
1.7 |
1.0 |
3.7 |
|
|
瞬時最大入力電流 |
A |
3.3 |
1.9 |
5.6 |
|
●Z5BLD60-◘A-25S-電圧24/36/48/110/220
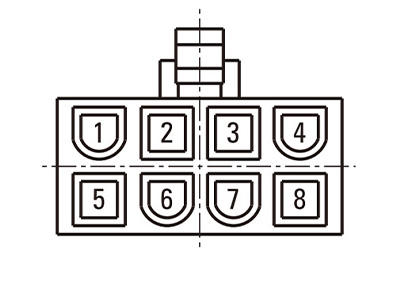
①コネクタ:5557-8r / 10r(モレックス)②リード線長300mm |
●Z5BLD60-220A-25S図(ZD標準ドライブ)
|
●低電圧wrieプラグホール対応信号の説明 |
|||||||||||||||||||||
 |
|
||||||||||||||||||||
●高電圧wrieプラグホール対応信号説明 |
|||||||||||||||||||||||||||||||||||||||||
|
4.jpg?imageView2/2/format/jp2) |
||||||||||||||||||||||||||||||||||||||||
|
●平行軸減速機 Z5BLD60-◘GN-25S/ 5GN□K◘—電圧24/36/48/110/220□一速度比値
①コネクタ:5557-8r / 10r(モレックス)②リード線シース長さ300mm③丸型端子:SRA-21T-4(低地) |
●デシマルギアヘッド 5GN□XK □—のギア比は通常10です
•型番名のボックス(□)にギア比を入力します |
•Z5BLD40-◘GN-25S/ 5GN□Kギア・モータ許容トルク(単位:N.m)
|
型番 |
モーター速度/減速比 |
3 |
3.6 |
5 |
6 |
7.5 |
9 |
10 |
12.5 |
15 |
18 |
20 |
25 |
30 |
36 |
50 |
60 |
75 |
90 |
100 |
120 |
150 |
180 |
200 |
|
z5BLD40-◘GN |
200〜1500RPM |
0.48 |
0.58 |
0.80 |
0.97 |
1.21 |
1.45 |
1.61 |
2.01 |
2.41 |
2.90 |
2.90 |
3.63 |
4.35 |
5.22 |
7.25 |
7.87 |
9.83 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
|
2000RPM |
0.46 |
0.56 |
0.77 |
0.93 |
1.16 |
1.39 |
1.55 |
1.93 |
2.34 |
2.51 |
2.79 |
3.49 |
4.18 |
5.10 |
6.30 |
7.56 |
9.45 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
|
|
2500RPM |
0.37 |
0.45 |
0.62 |
0.74 |
0.93 |
1.11 |
1.24 |
1.55 |
1.86 |
2.01 |
2.23 |
2.79 |
3.35 |
4.02 |
5.04 |
6.05 |
7.56 |
9.08 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
•Z5BLD60-◘GN-25S/ 5GN□BKギア・モータ許容トルク(単位:N.m)
|
型番 |
モーター速度/減速比 |
3 |
3.6 |
5 |
6 |
7.5 |
9 |
10 |
12.5 |
15 |
18 |
20 |
25 |
30 |
36 |
50 |
60 |
75 |
90 |
100 |
120 |
150 |
180 |
200 |
|
z5BLD60-◘GN |
200 〜1500RPM |
0.72 |
0.87 |
1.21 |
1.45 |
1.81 |
2.17 |
2.41 |
3.02 |
3.62 |
4.34 |
4.35 |
5.44 |
6.53 |
7.83 |
9.83 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
|
2000RPM |
0.70 |
0.84 |
1.16 |
1.39 |
1.74 |
2.09 |
2.32 |
2.90 |
3.48 |
3.76 |
4.18 |
5.23 |
6.27 |
7.54 |
9.45 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
|
|
2500RPM |
0.56 |
0.67 |
0.93 |
1.11 |
1.39 |
1.67 |
1.86 |
2.32 |
2.78 |
3.01 |
3.35 |
4.18 |
5.02 |
6.02 |
7.56 |
9.08 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
10.0 |
注意:表内灰色で表示している部分は、その回転方向がモータの一致していることを示しています。(異なる回転速度及びギア比でのトルクはZD製のドライバーで測定し得た値になっています。)
 JP
JP1.jpg?imageView2/2/format/jp2)
5.jpg?imageView2/2/format/jp2)
6.jpg?imageView2/2/format/jp2)