JP
JP


注意:
誤用による人や物への損害を避けるため、設置、配線、操作、保守、点検については、以下の注意事項にご注意ください。
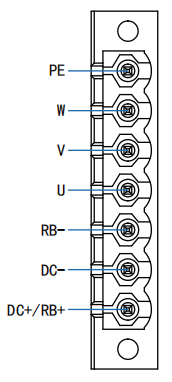
1】サーボシステムがしっかりと接地されていることを確認するために、アース線をアースマーク付きの端子に接続してください。
2】電源を切ってから5分以内にモーター、配線、配線端子に触れないでください。感電の恐れがあります。
3】火傷を防ぐため、運転中はヒートシンク、モーター、制動抵抗器に触れないでください。
4】過電流保護装置、残留電流遮断器、非常停止装置を設置し、有効性を確認してから運転してください。
5】外部非常停止回路を設定して、時間内に運転を停止し、緊急時に電源を遮断できるようにしてください。
6】試運転前の事故防止のため、無負荷でサーボモータを運転してください。
7】サーボドライバの電源を頻繁にオン/オフしないでください。
8】電源投入時の設置、配線、その他の操作は固くお断りいたします。
9】モーター線端子を主電源に接続しないでください。
10】サーボモータドライバを自分で分解、改造、修理しないでください。
11】エラーが発生した場合は、ドライバの電源を切ってください。
12】長期間使用しない場合は、電源を切る必要があります。
保管環境:
この製品は、設置する前に梱包箱に入れる必要があります。一時的に使用しない場合は、保管時に以下の点にご注意ください。
製品を当社の保護範囲および将来のメンテナンスに準拠させるために:
製品を当社の保護範囲および将来のメンテナンスに準拠させるために:
●保管場所の環境温度は、-20°Cから80°Cの範囲内である必要があります。
●保管場所の相対湿度は、凝縮せずに0%から90%の範囲内である必要があります。
●腐食性のガスや液体が含まれる環境での保管は避けてください。
設置環境:
●サーボユニットの使用環境温度:0〜45℃。
●湿度:90%RH未満(相対湿度)。
●振動:4.9m /s²、適用可能な高度:1000m未満、1000mを超える場合は、より低い電力が必要です。
●凍結や凝縮を避けるため
●長期間の使用の信頼性を確保するため、45°C未満の環境温度で使用してください。
●サーボユニットの使用環境温度:0〜45℃。
●湿度:90%RH未満(相対湿度)。
●振動:4.9m /s²、適用可能な高度:1000m未満、1000mを超える場合は、より低い電力が必要です。
●凍結や凝縮を避けるため
●長期間の使用の信頼性を確保するため、45°C未満の環境温度で使用してください。

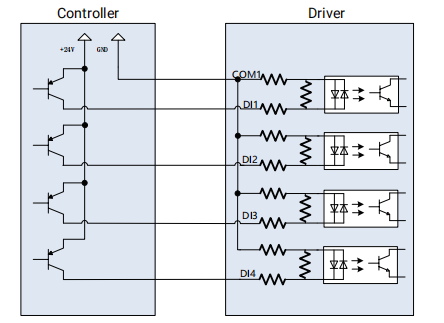
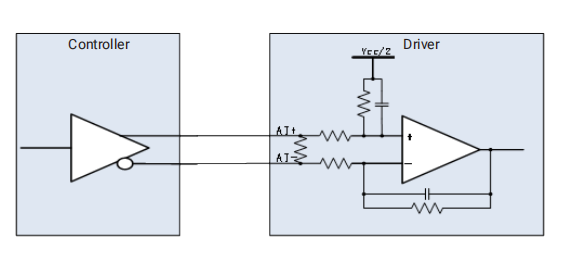
 注:24Vパルス信号を接続する場合は、2K抵抗をパルス信号線に接続し、電力を0.5W以上にする必要があります。
注:24Vパルス信号を接続する場合は、2K抵抗をパルス信号線に接続し、電力を0.5W以上にする必要があります。