■ギアモータートルクテーブル
●ギアヘッドとミッドギヤボックスは別売りです。端子箱を(T)で表すコードを型番名内の□に記入してください。
●(□)にギア比をご記入ください。
●速度は、モーターの同期速度(50hz:1500r / min、60hz:1800r / min)をギア比で割った値です。実際の速度は、負荷のサイズに応じて、表示された値より2〜20%低くなります。
●表のクリア比を超えて減速する場合は、ギヤヘッドとモーターの間にミッドギアボックス(ギア比:10)を取り付けてください。その場合の許容トルクは20n・mです。
■許容トルク単位:上(n.m)/下(kgf.cm)
|
モータ型番
|
ギアラト
|
3
|
3.6
|
5
|
6
|
7.5
|
9
|
12.5
|
15
|
18
|
25
|
30
|
36
|
50
|
60
|
75
|
90
|
100
|
120
|
150
|
180
|
|
回転速度rpm
|
50Hz
|
500
|
417
|
300
|
250
|
200
|
166
|
120
|
100
|
83
|
60
|
50
|
42
|
30
|
25
|
20
|
16
|
15
|
12
|
10
|
8
|
|
60Hz
|
600
|
500
|
360
|
300
|
240
|
200
|
144
|
120
|
100
|
72
|
60
|
50
|
36
|
30
|
24
|
20
|
18
|
15
|
12
|
10
|
|
5IK40GU-A□
5IK40GU-E□
5IK40GU-C□
5IK40GU-H□
5IK40GU-S□
|
5GU□ RC
5GU□ RT
|
許容トルク
|
50Hz
|
0.57
|
0.68
|
0.59
|
1.14
|
1.58
|
1.89
|
2.63
|
3.16
|
3.79
|
5.26
|
6.31
|
6.8
|
9.5
|
11.4
|
14.2
|
17.0
|
18.9
|
20.0
|
20.0
|
20.0
|
|
5.80
|
6.96
|
9.66
|
11.6
|
16.1
|
19.3
|
26.8
|
32.2
|
38.6
|
53.7
|
64.4
|
70
|
97
|
116
|
145
|
174
|
193
|
200
|
200
|
200
|
|
60Hz
|
0.46
|
0.55
|
0.76
|
0.92
|
1.27
|
1.53
|
2.12
|
2.55
|
3.05
|
4.24
|
5.09
|
5.50
|
7.64
|
9.16
|
11.5
|
13.7
|
15.3
|
18.3
|
20.0
|
20.0
|
|
4.67
|
5.61
|
7.79
|
9.35
|
13.0
|
15.6
|
21.6
|
26.0
|
31.2
|
43.3
|
51.9
|
56.1
|
77.9
|
93.5
|
117
|
140
|
156
|
187
|
200
|
200
|
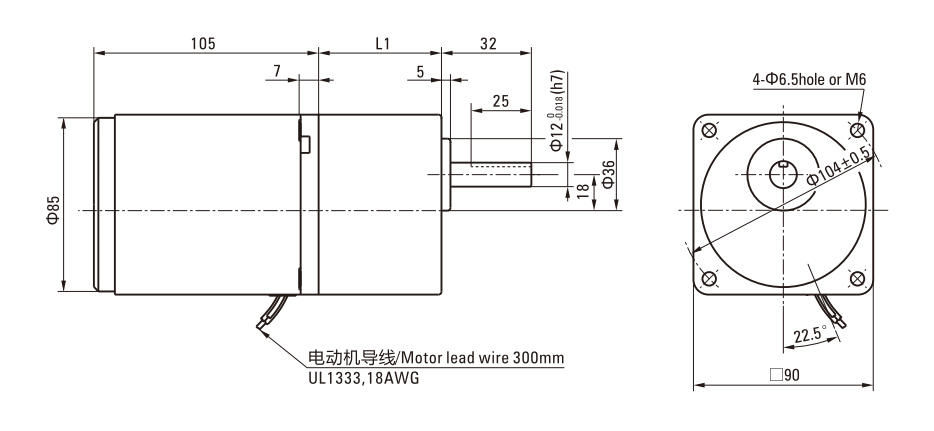
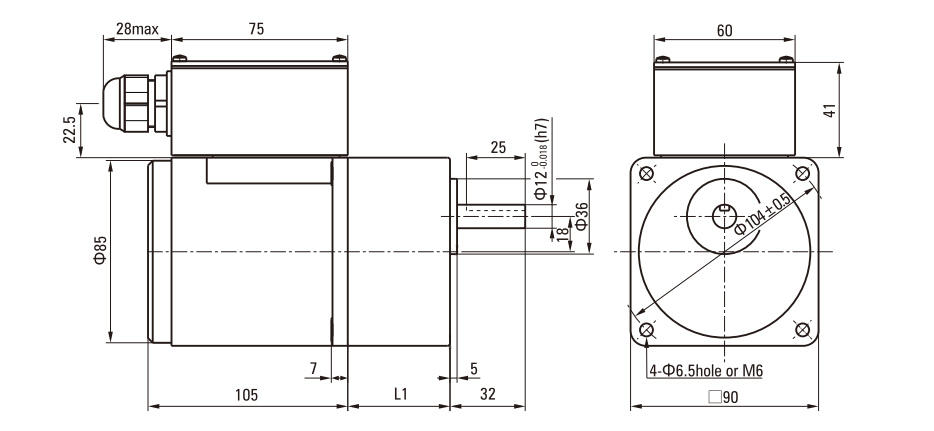
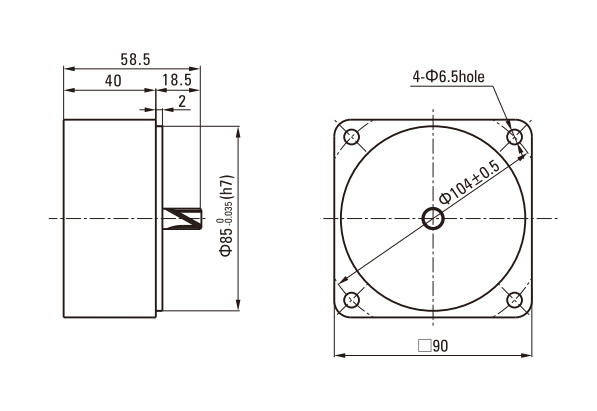
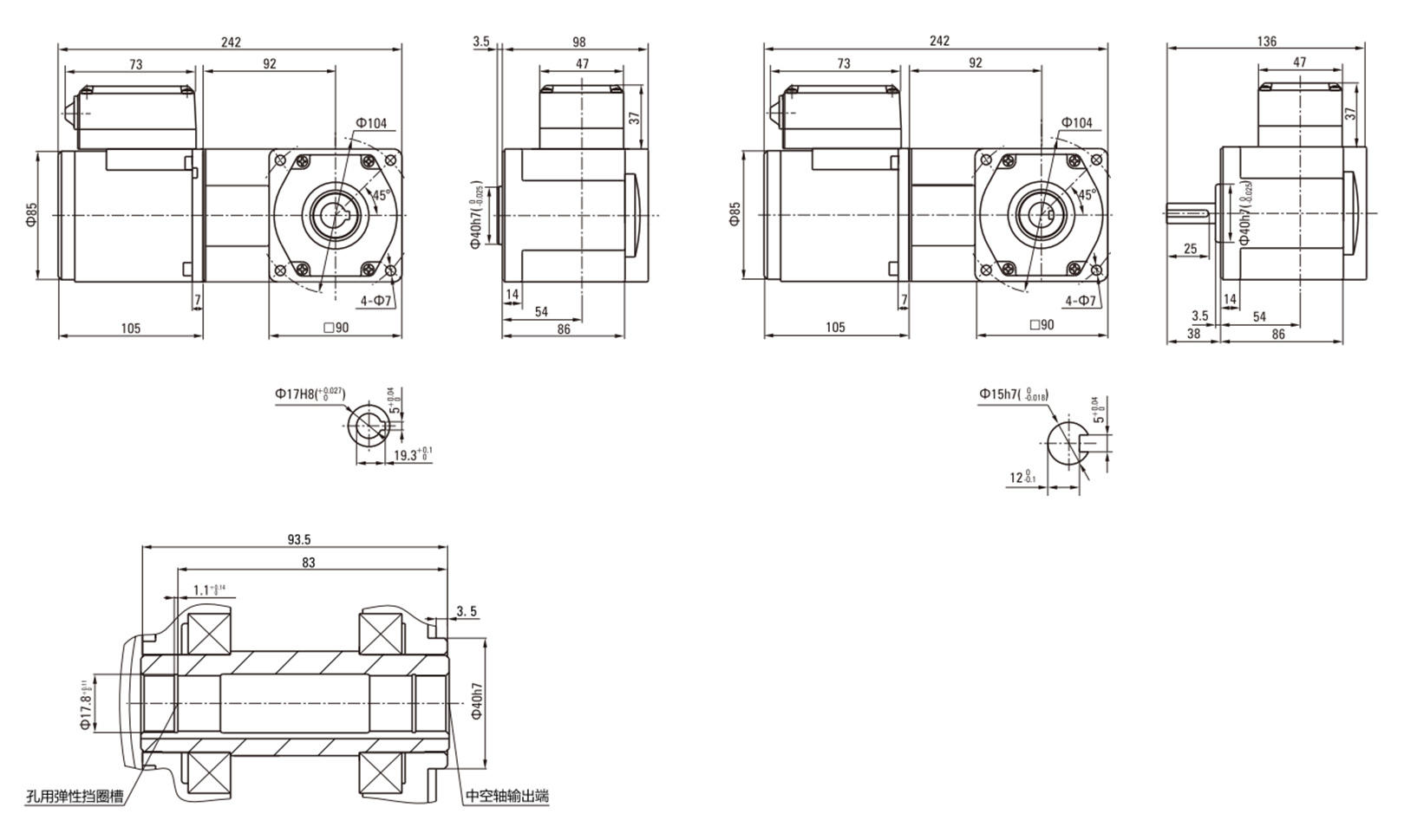
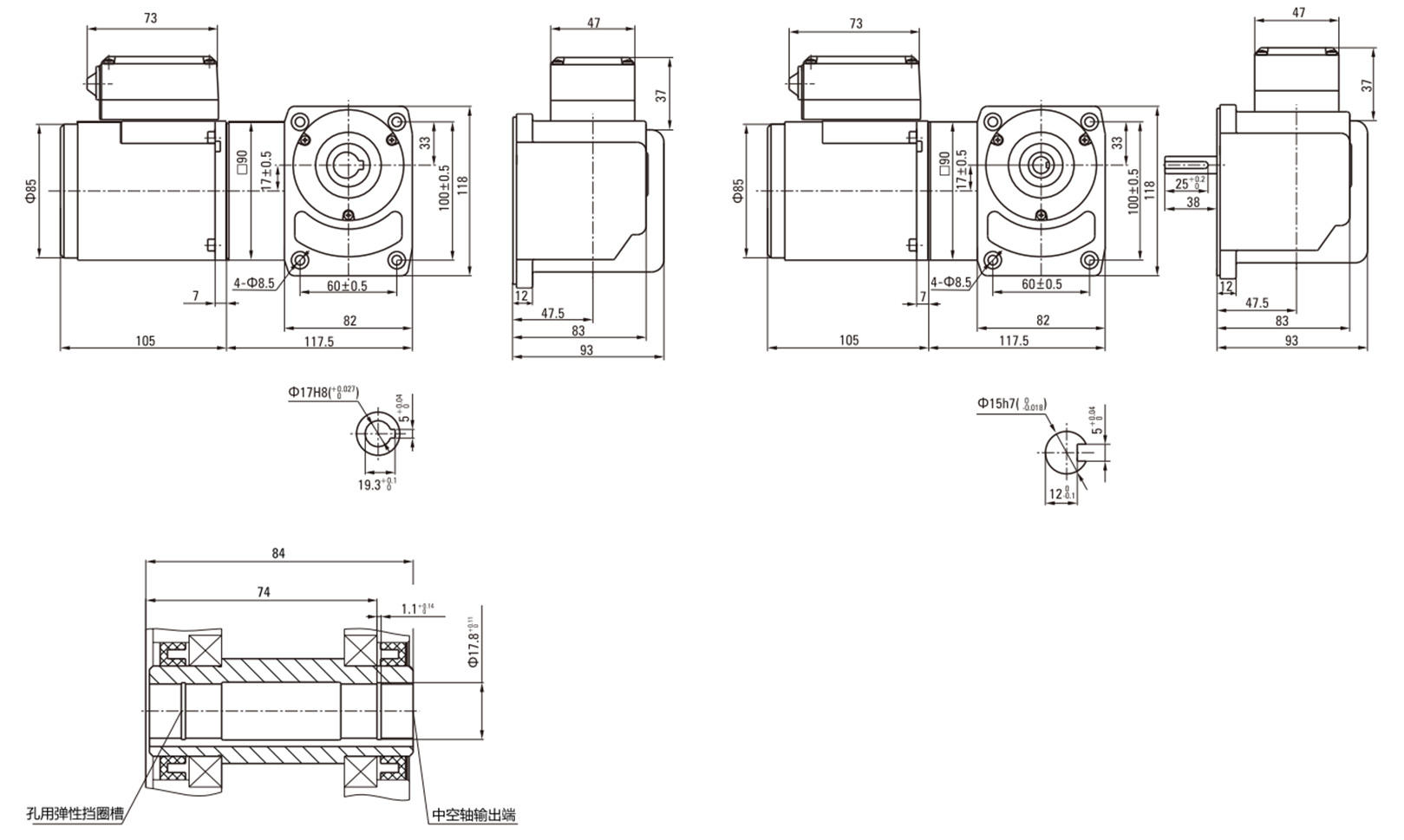
■誘導式図面

■ギアモータ・トルク表
ギアヘッドとミッドギアボックスは別売りです。端子箱を(T)で表すコードを型式内のボックス(口)に入力してください。
型番名内のボックス(口)にギア比を入力してください。
速度は、モーターの同期速度(50hz:1500r / min、60hz:1800r / min)をギア比で割って算出します。実際の速度は、負荷のサイズに応じて、表示された値より2%〜20%低くなります。
表のギア比を超えて減速する場合は、ギヤヘッドとモーターの間にミッドギアボックス(ギア比:10)を取り付けてください。その場合の許容トルクは20n・mです。
■許容トルク単位:上(n.m)/下(kgf.cm)
|
モータ型番
|
ギア比
|
3
|
3.6
|
5
|
6
|
7.5
|
9
|
12.5
|
15
|
18
|
25
|
30
|
36
|
50
|
60
|
75
|
90
|
100
|
120
|
150
|
180
|
|
回転速度rpm
|
50Hz
|
500
|
417
|
300
|
250
|
200
|
166
|
120
|
100
|
83
|
60
|
50
|
42
|
30
|
25
|
20
|
16
|
15
|
12
|
10
|
8
|
|
60Hz
|
600
|
500
|
360
|
300
|
240
|
200
|
144
|
120
|
100
|
72
|
60
|
50
|
36
|
30
|
24
|
20
|
18
|
15
|
12
|
10
|
|
5IK40GU-A□
5IK40GU-E□
5IK40GU-C□
5IK40GU-H□
5IK40GU-S□
|
5GU□RH
5GU□RA
|
手当
トルク
|
50Hz
|
0.41
|
0.50
|
0.62
|
0.74
|
0.93
|
1.11
|
1.55
|
1.86
|
2.23
|
3.09
|
3.71
|
4.46
|
6.19
|
7.43
|
9.28
|
11.1
|
12.4
|
14.9
|
18.6
|
20.0
|
|
4.21
|
5.05
|
6.31
|
7.58
|
9.47
|
11.4
|
15.8
|
18.9
|
22.7
|
31.6
|
37.9
|
45.5
|
63.1
|
75.8
|
94.7
|
114
|
126
|
152
|
189
|
200
|
|
60Hz
|
0.33
|
0.40
|
0.50
|
0.60
|
0.75
|
0.90
|
1.25
|
1.50
|
1.80
|
2.50
|
2.99
|
3.59
|
4.99
|
5.99
|
7.49
|
8.98
|
9.98
|
12.0
|
15.0
|
18.0
|
|
3.39
|
4.07
|
5.09
|
6.11
|
7.64
|
9.17
|
12.7
|
15.3
|
18.3
|
25.5
|
30.6
|
36.7
|
50.9
|
61.1
|
76.4
|
91.7
|
102
|
122
|
153
|
183
|
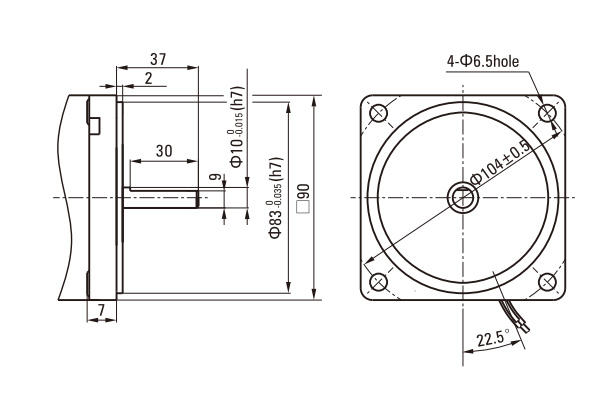
■誘導式図面

■配線図
●モーターの回転方向は、モーター軸端から見た方向です。 cwは時計回りの方向を表し、ccwは反時計回りの方向を表します。
●リストに記載されている名称はピニオンシャフトタイプで、同等の丸シャフトタイプにも有効です。
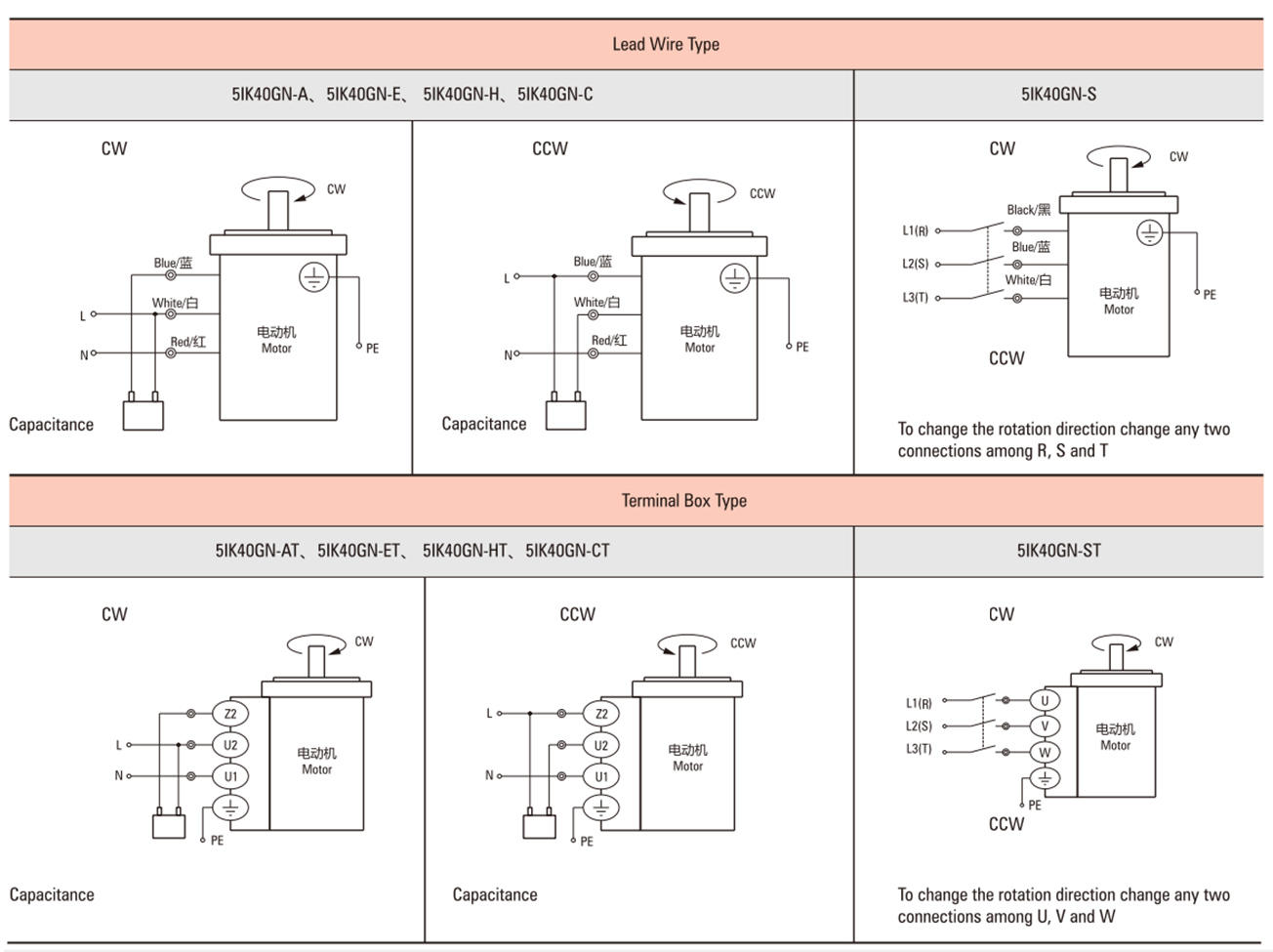
注意:
単相モーターの回転方向は、モーターを停止させてから変更してください。
モーターの回転中に回転方向を変更しようとすると、モーターは逆転コマンドを無視するか、少し遅れて回転方向を変更することがあります。
 JP
JP